
Newer force-torque sensors enable robots to move with safety, reliability, and precision. Source: Pixabay, ATO Automation
We’ve all seen it on the factory floor. A small collaborative robot is tasked with assembling a delicate electronics module. The payload is barely a couple of kilograms. The parts are light, fragile, and unforgiving. A connector bends if insertion force is off by a few tenths of a newton. A plastic latch snaps if torque spikes for even a few milliseconds.
This is exactly where traditional force sensing starts to fall apart.
For years, many small-payload cobots relied on motor-current estimation or low-resolution force-torque sensors mounted at the end effector. That approach works fine for rough tasks.
It struggles badly when forces are subtle, directions change fast, or compliance matters more than speed. We’ve watched cobots hesitate during insertion, chatter during polishing, or overreact to phantom collisions caused by noisy signals.
High-sensitivity torque sensors change that equation.
By measuring torque directly at the joint or with ultra-fine resolution at the wrist, these sensors can unlock real force feedback for cobots carrying up to 5 kg (11 lb.). We’re talking sensitivities down to 0.05 N or 0.002 Nm, fast enough to catch micro-collisions before they become macro problems.
For small-payload systems, that’s not a luxury. It’s the difference between automation that looks good in demos and automation that runs three shifts a day.
In recent deployments, we’ve seen force-feedback cobots handle electronics assembly—like inserting micro-connectors into smartphone PCBs—hand-guided teaching for rapid reprogramming, and cable routing through tight electrical panels with a level of finesse that used to require expensive industrial arms or custom compliance hardware.
The common thread is better torque sensing. Not more sensors. Better ones.
Let’s look at how high-sensitivity torque sensors for cobots actually work, where they deliver the most value, and what’s happening right now in the market. We’ll stay practical. No generic robotics history. No marketing fluff. Just what matters when you’re choosing torque sensing for small-payload collaborative robots.
What makes torque sensors ‘high-sensitivity’ in cobots?
Not all torque sensors deserve the high-sensitivity label, especially in cobot applications. In small-payload systems, the difference between usable data and noise is razor-thin.
At a technical level, high-sensitivity torque sensors deliver resolution that’s typically three to five times better than standard industrial sensors. For cobots under 5 kg payload, that means reliably detecting forces below 0.1 N and torque changes below a few thousandths of a newton-meter.
We’ve seen three core design choices drive this performance.
First is the sensing principle. Strain gauge-based torque sensors still dominate cobot joints because they offer excellent linearity and mature signal conditioning. The best designs use optimized flexures with hourglass or spoke geometries. These concentrate strain where gauges are mounted while keeping the structure stiff in unwanted directions. Optical torque sensors exist, but packaging and cost often limit their use in small joints.
Second is mechanical integration. High-sensitivity designs are low-profile and often ring-shaped, allowing direct integration into harmonic or strain wave gearboxes. This minimizes compliance stack-up. Less mechanical play means cleaner signals. It also means better repeatability during fast direction changes.
Third is electronics. Sampling rates of 2000 Hz or higher are now common in cobot-focused torque sensors. That matters. Small-payload cobots move fast relative to their mass. If your sensor lags, your control loop will always feel soft or unstable. Temperature drift is also tightly controlled, often keeping accuracy loss under 2% across the operating range.
When we talk about small-payload cobot torque sensing, sensitivity isn’t just a spec on a datasheet. It’s the combined outcome of mechanical design, signal processing, and how close the sensor sits to the actual joint torque path.
Get that wrong, and no amount of software tuning will save you.
Design choices affect force torque sensitivity. Source: Pixabay, ATO Automation
How can high-sensitivity torque sensors improve cobot safety?
Cobot safety is where high-sensitivity torque sensing earns its keep.
Most collaborative robots rely on force and torque limits to meet safety standards. The challenge with small-payload cobots is that absolute forces are low to begin with. A collision might only generate a fraction of a newton before damage occurs. If your sensor resolution is coarse, you won’t see it until it’s too late.
High-sensitivity torque sensors enable true joint-level force monitoring. Instead of inferring collisions from motor current, the controller sees torque spikes directly. That improves both detection speed and accuracy.
In real deployments, we’ve seen this reduce false positives dramatically. A cobot polishing a plastic housing for consumer electronics can distinguish between expected contact force and an unexpected obstruction—like a worker’s hand nearby. The difference might be 0.1 N. With high-resolution sensing, the robot reacts smoothly instead of slamming to a halt.
Another benefit is compliant motion. Cobot force control depends on clean feedback. High-sensitivity torque sensors allow impedance and admittance control loops to run tighter without oscillation. That’s critical for tasks like hand-guiding, where the robot should feel light and responsive rather than stiff or laggy, such as during intuitive path programming by shop floor technicians.
Joint-level sensing also scales better than relying only on a 6-axis force torque sensor at the wrist. Each joint contributes its own torque data, giving the controller a richer picture of interaction forces. For collaborative robot sensors, that distributed awareness translates into safer, more predictable behavior.
Safety standards haven’t changed overnight. But the practical safety envelope has expanded because the robot understands its world with finer granularity.

Multiple force torque sensors are needed for cobot applications. Source: Pixabay, ATO Automation
Force feedback essentials for small-payload cobots
Force feedback in cobots isn’t magic. It’s closed-loop control done right.
At the core is a fast control loop where torque measurements feed directly into motion commands. In force feedback cobots, this loop typically runs at 500 to 2,000 Hz. High-sensitivity torque sensors make that loop meaningful at low force levels.
We’ve found joint-level torque sensing especially valuable for small payloads. When sensors sit in each joint, the controller can compensate for gravity, friction, and external contact independently. That matters when the end effector weighs less than the gearbox it’s attached to.
End-effector force-torque sensors still have their place. They’re great for tasks requiring precise Cartesian force control. But for small-payload cobot torque sensing, joint sensors often deliver better signal-to-noise ratios and faster response.
Collision detection is another area where force feedback shines. With high-resolution torque data, the robot can detect contact direction and magnitude almost instantly. Instead of stopping abruptly, it can back off compliantly—as seen in pick-and-place operations with fragile glass components. That’s not just safer; it’s gentler on tooling and parts.
We’ve also seen force feedback improve repeatability. When insertion forces are controlled instead of position alone, variation in parts or fixtures matters less. The robot adapts in real time, for example, during battery cell insertion in wearable device assembly.
In short, high-sensitivity torque sensors turn force control from a checkbox feature into a daily productivity tool.

Sensors can be in the robot arms or end effectors. Source: Pixabay, ATO Automation
Key applications in precision tasks
Small-payload cobots live in the world of precision.
One common application is end-of-line testing for small components like buttons, switches, or connectors on automotive control panels. The required actuation force might be under 1 newton.
High-sensitivity torque sensors allow the cobot to press until a force threshold is reached, not just a position. That improves test consistency and reduces scrap.
Cable routing inside electrical cabinets for solar inverters is another standout. Anyone who’s tried to automate this knows how unforgiving it is. With precise torque measurement robotics, the cobot feels resistance changes as cables bend or snag around connectors. It adjusts path and speed dynamically.
We’ve also seen success in electronics polishing and deburring of aluminum smartphone cases. These tasks demand constant contact force over complex surfaces. High-sensitivity torque sensors keep force stable even as geometry changes.
Hand-guided teaching is where operators notice the difference immediately. With good torque sensing, the robot feels light and intuitive during fixture alignment setups. Operators don’t fight inertia or friction. They guide. The result is faster setup and better acceptance on the shop floor.
Medical device assembly—like catheter tip forming—and minimally invasive component insertion into diagnostic tools are emerging areas as well. Here, force limits are strict and documentation matters. Clean torque data helps with both control and traceability, ensuring compliance in cleanroom environments.
Across these use cases, the common thread is subtle force interaction. That’s exactly where high-sensitivity torque sensors excel.
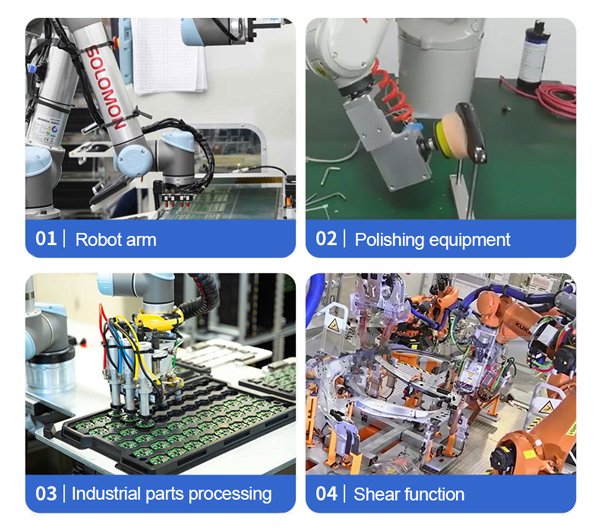
Examples of industrial force torque sensor applications. Source: ATO Automation
Top sensors and integrations on the market
Several sensor suppliers are shaping this space right now.
One of the most talked-about options is the SenseONE T5 by Bota Systems. Designed for cobots up to 5 kg payload, it delivers force sensitivity down to 0.05 N and torque resolution around 0.002 Nm. It’s compact, dustproof, and integrates cleanly via EtherCAT and ROS.
We’ve seen it deployed for precision assembly of wearable sensors where traditional wrist sensors simply couldn’t resolve low forces reliably.
FUTEK offers custom low-profile joint torque sensors tailored for harmonic and strain-wave gears. These are popular in OEM cobot joints where space is tight. The company’s strain gauge designs focus on minimizing crosstalk and improving thermal stability, ideal for 24/7 pharmaceutical packaging lines.
TE Connectivity has ring-shaped torque sensors designed with safety in mind. Some models support ISO 13849 PL e architectures, making them attractive for collaborative applications like food-grade part handling where safety certification is front and center.
ATO provides high-precision strain gauge torque sensors suitable for dynamic and static measurements in cobot setups. These rotary and reaction torque sensors offer fast frequency response, reliable long-life performance, and capacities from small-scale joints to higher loads, making them versatile for precision tasks like viscometer manufacturing or electric torque wrench calibration in automated assembly lines.
Many of these sensors pair naturally with frameless BLDC (brushless DC) torque motors. High torque density and low cogging complement sensitive torque measurement, especially in direct-drive or quasi-direct-drive joints for lab automation.
Cost varies widely based on customization and volume, but integration effort often matters more than sensor price alone.
Torque sensor comparison for small-payload cobots
| Sensor | Sensitivity | Payload range | Interface | Integration notes |
|---|---|---|---|---|
| Bota Systems SenseONE T5 | 0.05 N / 0.002 Nm | Up to 5 kg | EtherCAT, ROS | Compact, IP-rated |
| FUTEK Joint Torque | Custom, high | OEM-dependent | Analog, digital | Low-profile for harmonic drives |
| TE Connectivity Ring | High | Joint-level | Safety IO | ISO 13849 support |
| ATO Torque Sensor | 0.1% FS | 0.05Nm to ~30,000Nm, custom | Digital:RS485(Modbus-RTU), Analog:0~10V,±5V,±10V,4~20mA | 1kHz, Range≤500Nm: 8,000rpm; Range>500Nm: 6000rpm |
Integration challenges and practical solutions
Even the best sensor can fail if integration is sloppy.
One challenge we see often is mechanical alignment. Torque sensors must sit directly in the load path. Any side loads or misalignment introduce errors and reduce sensitivity. Using purpose-built adapters or integrated housings helps, but many modern cobots avoid adapters entirely, such as in seamless retrofit kits for legacy UR3 arms.
Signal noise is another issue. High sensitivity means high susceptibility to electromagnetic interference (EMI). Good grounding, shielded cables, and clean power matter. So does proper filtering without adding latency, crucial in EMI-heavy welding cells.
On the software side, plug-and-play support has improved. Many collaborative robot sensors now ship with URCaps, ROS drivers, or TwinCAT libraries. That shortens commissioning time significantly for tasks like vision-guided bin picking.
Pairing torque sensors with BLDC motors also requires attention. Motor ripple can bleed into torque signals if not handled correctly. We’ve had success synchronizing motor control loops with sensor sampling to reduce crosstalk in multi-joint synchronized motion.
The good news is that most of these challenges are solved problems if addressed early. The bad news is that ignoring them leads to disappointing performance, no matter how good the sensor looks on paper.
Future trends and real-world case studies
Looking ahead, torque sensing is getting smarter.
We’re seeing early deployments of AI-enhanced force feedback, where machine learning models filter noise and predict contact intent. This is especially promising for tasks with variable parts or soft materials, like adaptive sanding in custom furniture production.
There’s also growing interest in extending these sensors into humanoid and mobile manipulator platforms. The lessons learned from joint torque sensors in cobots translate well to arms that operate in human environments, such as warehouse order-fulfillment robots.
In electronics manufacturing, one case study involved replacing current-based force estimation with high-sensitivity torque sensors across a fleet of small cobots for PCB connector insertion. The result was a measurable reduction in part damage from 2.3% to 0.4% and faster cycle times because conservative force limits could be relaxed safely.
Medical assembly lines report similar gains in stent packaging automation. When force is measured accurately, processes become both safer and faster—cutting defects by 35% while boosting throughput. That’s a rare win-win.
The trend is clear. As cobots get smaller and tasks get finer, torque sensing isn’t optional. It’s fundamental.

Choose the right torque sensor for your cobot
If you’re working with small-payload cobots, torque sensing deserves serious attention.
High-sensitivity torque sensors unlock force feedback that actually works at low forces. They can improve safety, enhance compliance, and expand the range of tasks cobots can handle reliably—from microelectronics to medical devices.
The key is matching sensor sensitivity to payload and application. Over-specifying bandwidth or range adds cost without benefit. Under-specifying resolution limits everything else.
Look at integration first. Mechanical fit, software support, and control loop compatibility matter as much as raw specs. The SenseONE T5 shows how far plug-and-play sensors has come, while custom solutions from suppliers like FUTEK still make sense for OEM designs.
We’ve seen firsthand how small-payload cobot torque sensing transforms real deployments. Not in flashy demos, but in quieter, more stable production lines that just work.
 About the author
About the author
Faisal Mahmood is a seasoned digital marketing and tech content strategist with extensive experience in AI, software development, and SEO-driven content. He specializes in creating deeply researched, fact-based articles that help developers, enterprises, and tech teams understand the latest trends in AI-powered tools, coding best practices, and secure software development.
Mahmood is passionate about bridging the gap between emerging technology and practical insights for global audiences. He is reachable at [email protected].

